第一题
% 定义自然频率
wn = 2;
% 定义阻尼比数组
zeta_values = [0, 0.25, 0.5, 1.0, 2.0];
% 创建一个图形窗口
figure;
hold on;
% 绘制每个阻尼比的响应曲线
for i = 1:length(zeta_values)
zeta = zeta_values(i);
% 定义传递函数
sys = tf(wn^2, [1, 2*zeta*wn, wn^2]);
% 绘制单位阶跃响应
step(sys);
end
% 添加图例和标题
legend('zeta=0', 'zeta=0.25', 'zeta=0.5', 'zeta=1.0', 'zeta=2.0');
title('单位阶跃响应 - 不同阻尼比');
xlabel('时间 (s)');
ylabel('响应');
grid on;
hold off;
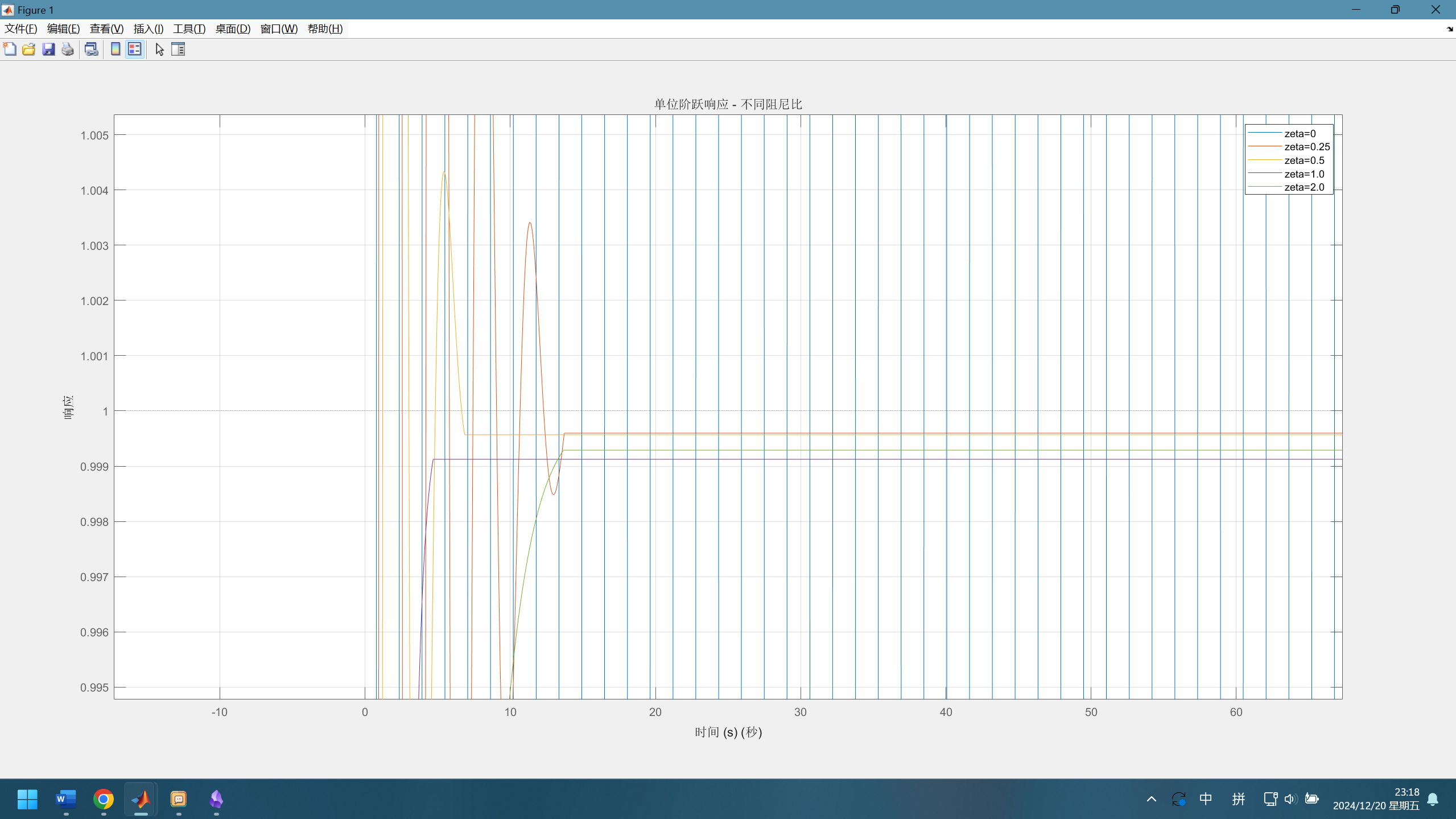
- 阻尼比 $\zeta$:
$\zeta = 0$:系统无阻尼,表现为持续振荡。
$0 < \zeta < 1$:系统为欠阻尼,表现为振荡逐渐衰减。
$\zeta = 1$:系统为临界阻尼,快速达到稳态,无振荡。
$\zeta > 1$:系统为过阻尼,响应缓慢,无振荡。
第二题
% 定义阻尼比
zeta = 0.25;
% 定义自然频率数组
wn_values = [1, 2, 4, 6];
% 创建一个图形窗口
figure;
hold on;
% 绘制每个自然频率的响应曲线
for i = 1:length(wn_values)
wn = wn_values(i);
% 定义传递函数
sys = tf(wn^2, [1, 2*zeta*wn, wn^2]);
% 绘制单位阶跃响应
step(sys);
end
% 添加图例和标题
legend('wn=1', 'wn=2', 'wn=4', 'wn=6');
title('单位阶跃响应 - 不同自然频率');
xlabel('时间 (s)');
ylabel('响应');
grid on;
hold off;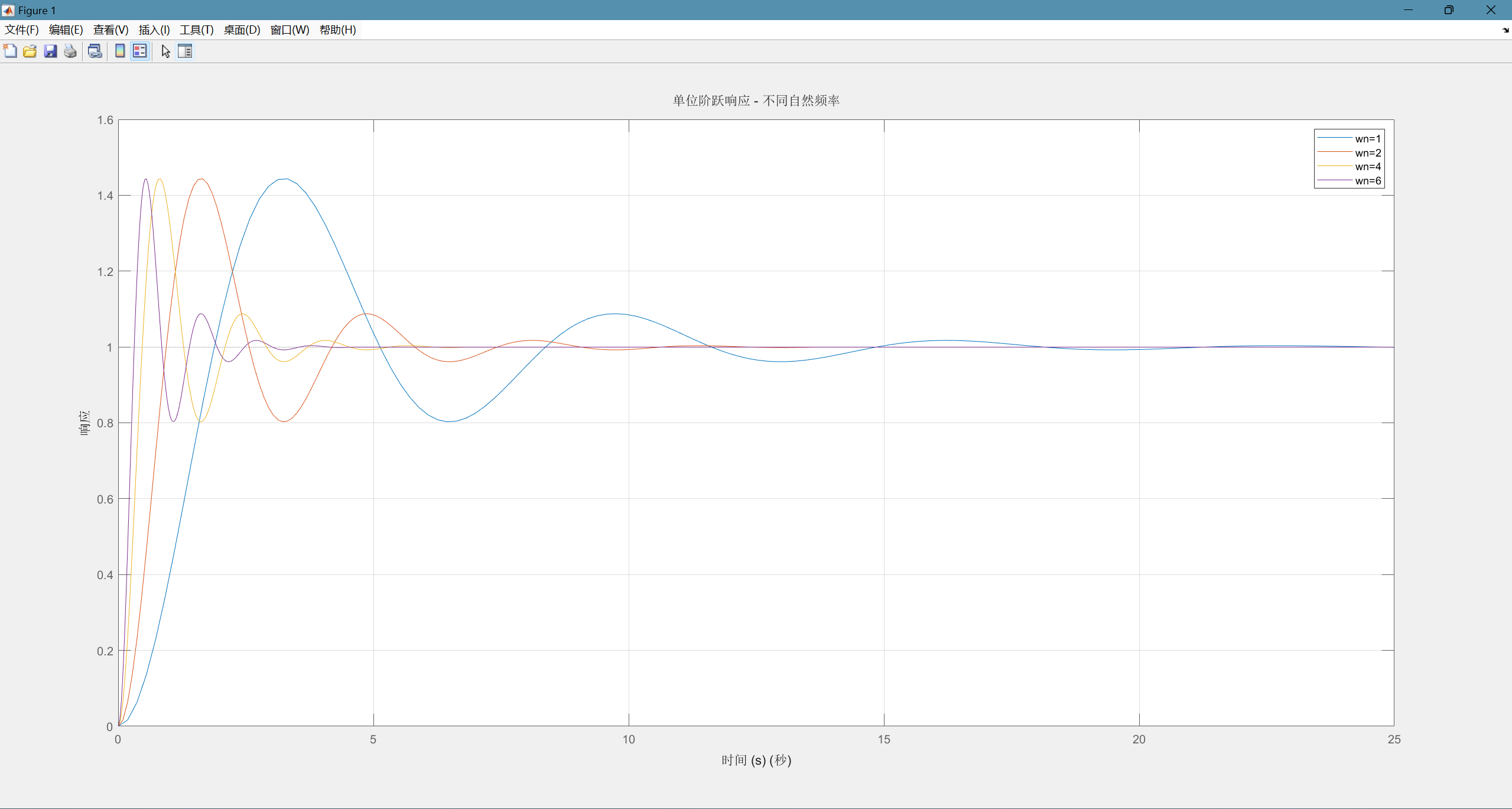
- 自然频率 $\omega_n$:
增加 $\omega_n$会加快系统响应速度。
$\omega_n$ 越大,系统达到稳态的时间越短。
2.请绘制下面单位负反馈系统的根轨迹曲线
(可自行设计开环传递函数)在MATLAB中采用根轨迹法求取使得闭环系统稳定的K值的范围。
% 定义传递函数的分子和分母
numerator = [1]; % K 是可变的,因此初始设置为 1
denominator = conv([1, 0], conv([1, 2, 2], [1, 6, 13]));
% 创建传递函数
sys = tf(numerator, denominator);
% 绘制根轨迹
figure;
rlocus(sys);
title('根轨迹');
xlabel('实部');
ylabel('虚部');
grid on;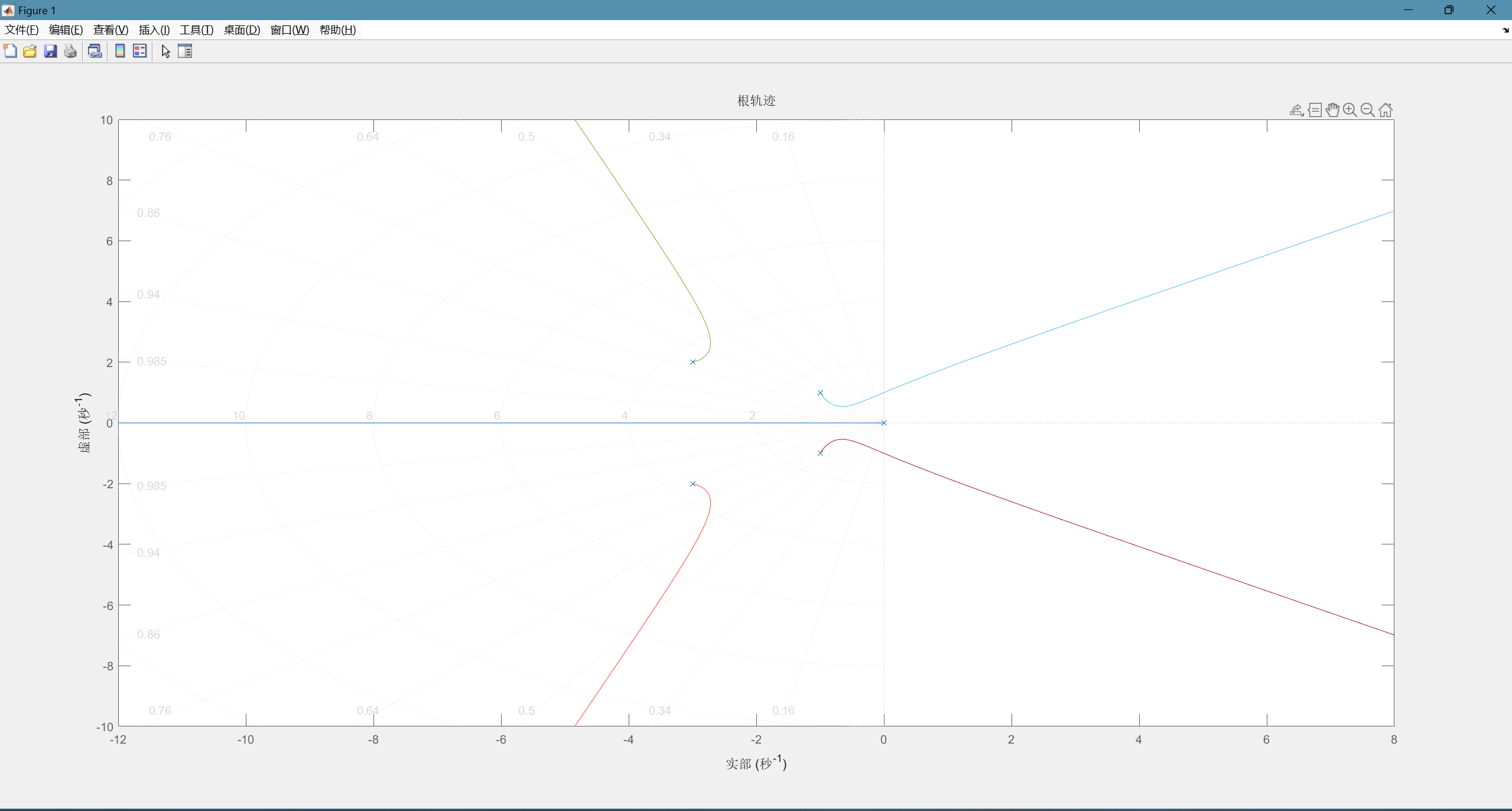
% 定义传递函数的分子和分母
numerator = [1]; % K 是可变的,因此初始设置为 1
denominator = conv([1, 0], conv([1, 2, 2], [1, 6, 13]));
% 创建传递函数
sys = tf(numerator, denominator);
% 计算根轨迹
[r, k] = rlocus(sys);
% 初始化稳定性范围
k_stable_min = Inf;
k_stable_max = -Inf;
% 遍历根轨迹数据,寻找稳定的 K 值范围
for i = 1:length(k)
poles = r(:, i);
if all(real(poles) < 0) % 检查所有极点是否在左半平面
k_stable_min = min(k_stable_min, k(i));
k_stable_max = max(k_stable_max, k(i));
end
end
% 输出稳定的 K 值范围
fprintf('稳定的 K 值范围: %.2f <= K <= %.2f\n', k_stable_min, k_stable_max);
第三题
% 定义传递函数的分子和分母
numerator = [1, 0.125];
denominator = conv([1, 0, 0], conv([1, 5], conv([1, 20], [1, 50])));
% 创建传递函数
sys = tf(numerator, denominator);
% 打开根轨迹设计工具
rltool(sys);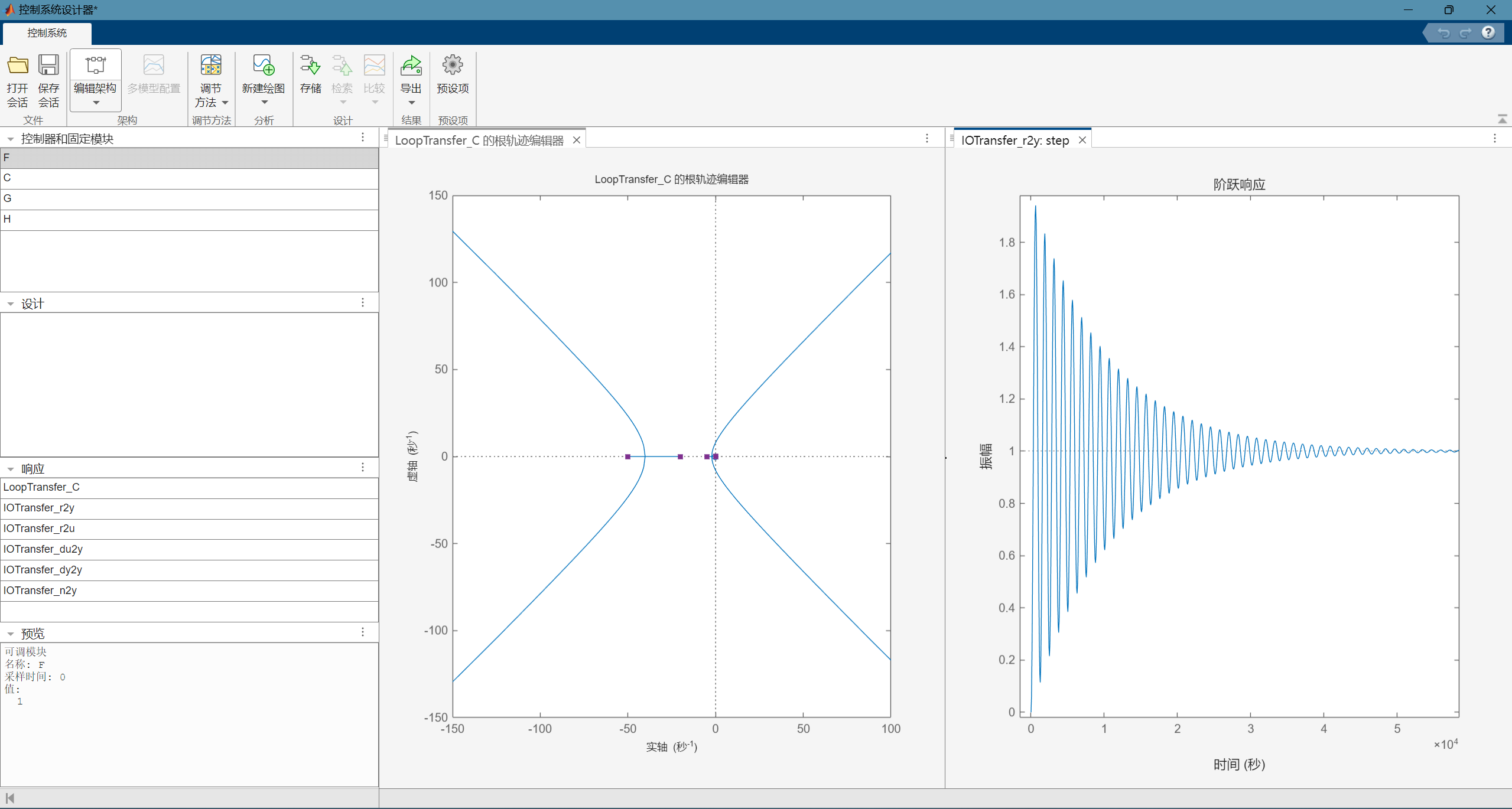
添加一个实零点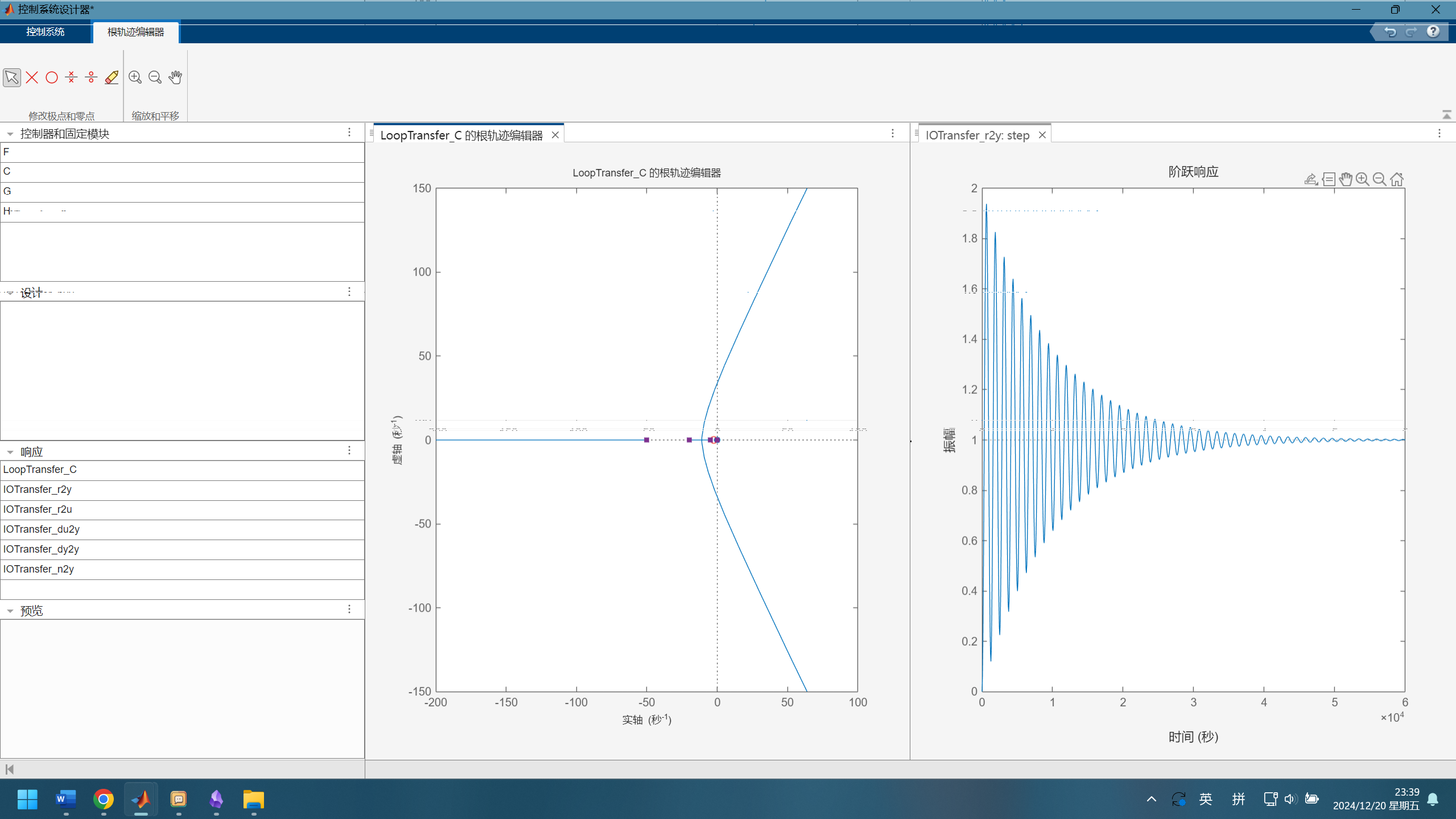
第四题
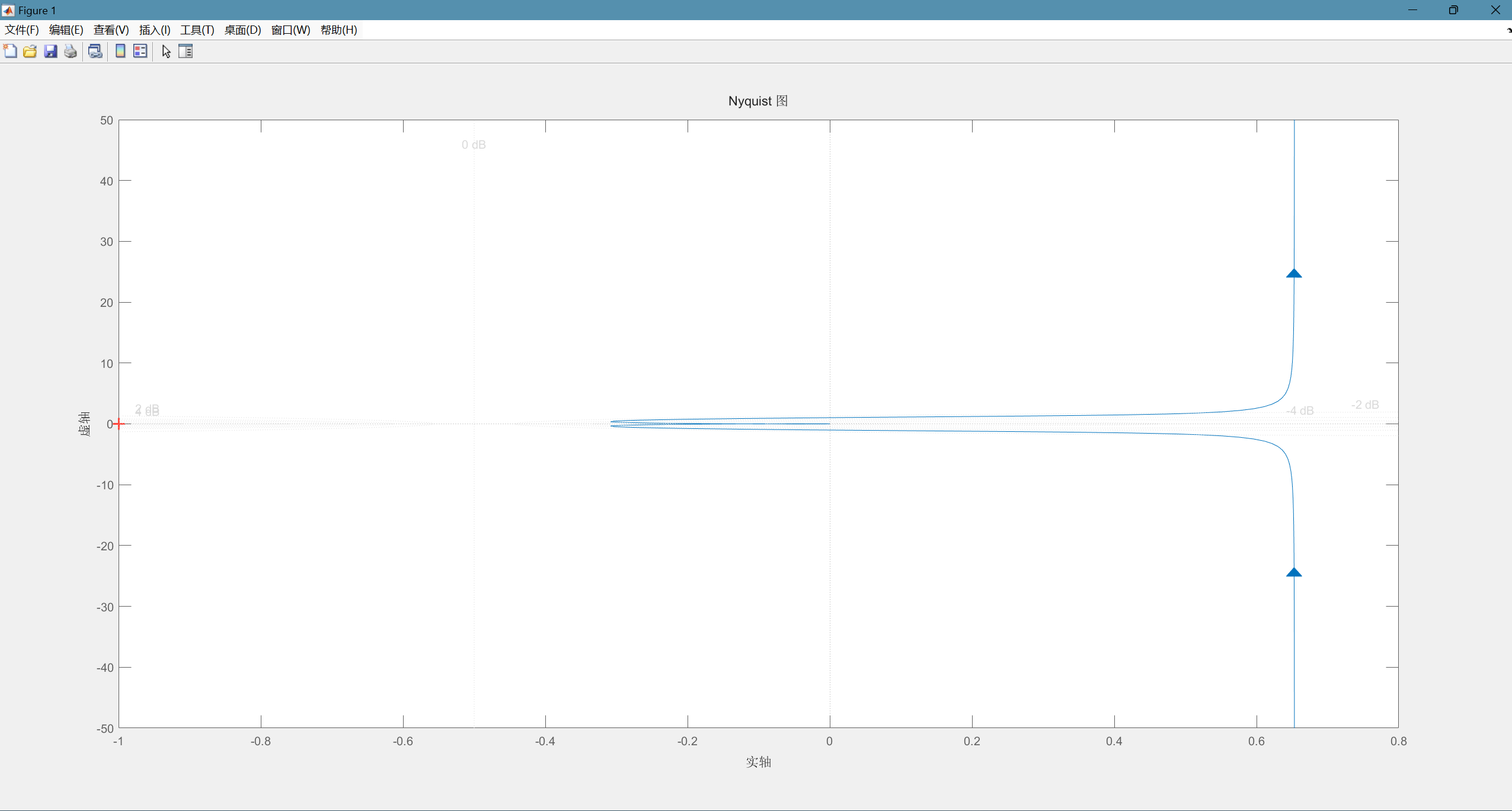
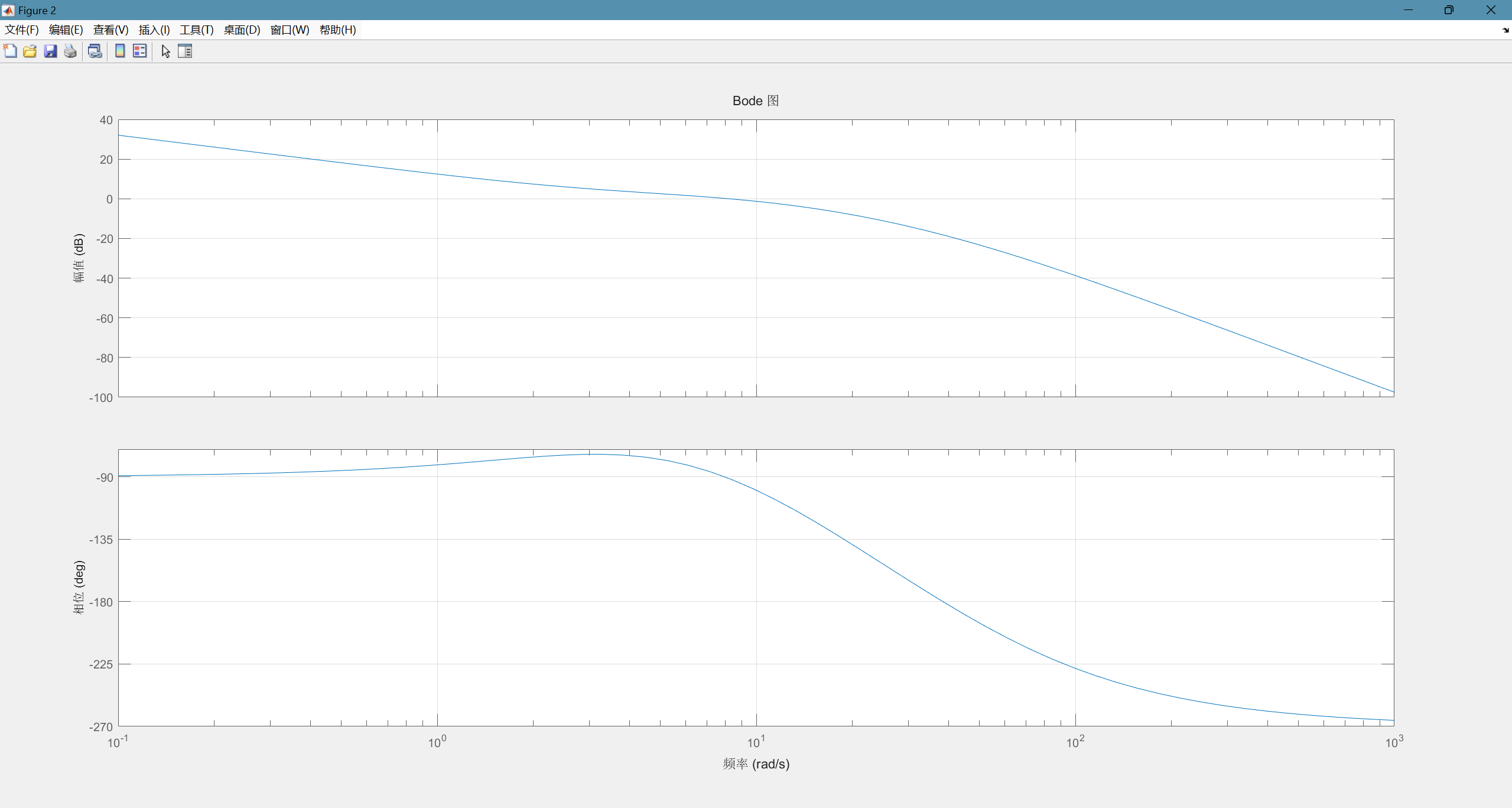
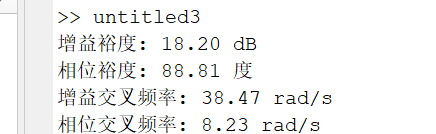
相位裕度和增益裕度都为正,Nyquist曲线不包围-1,系统稳定
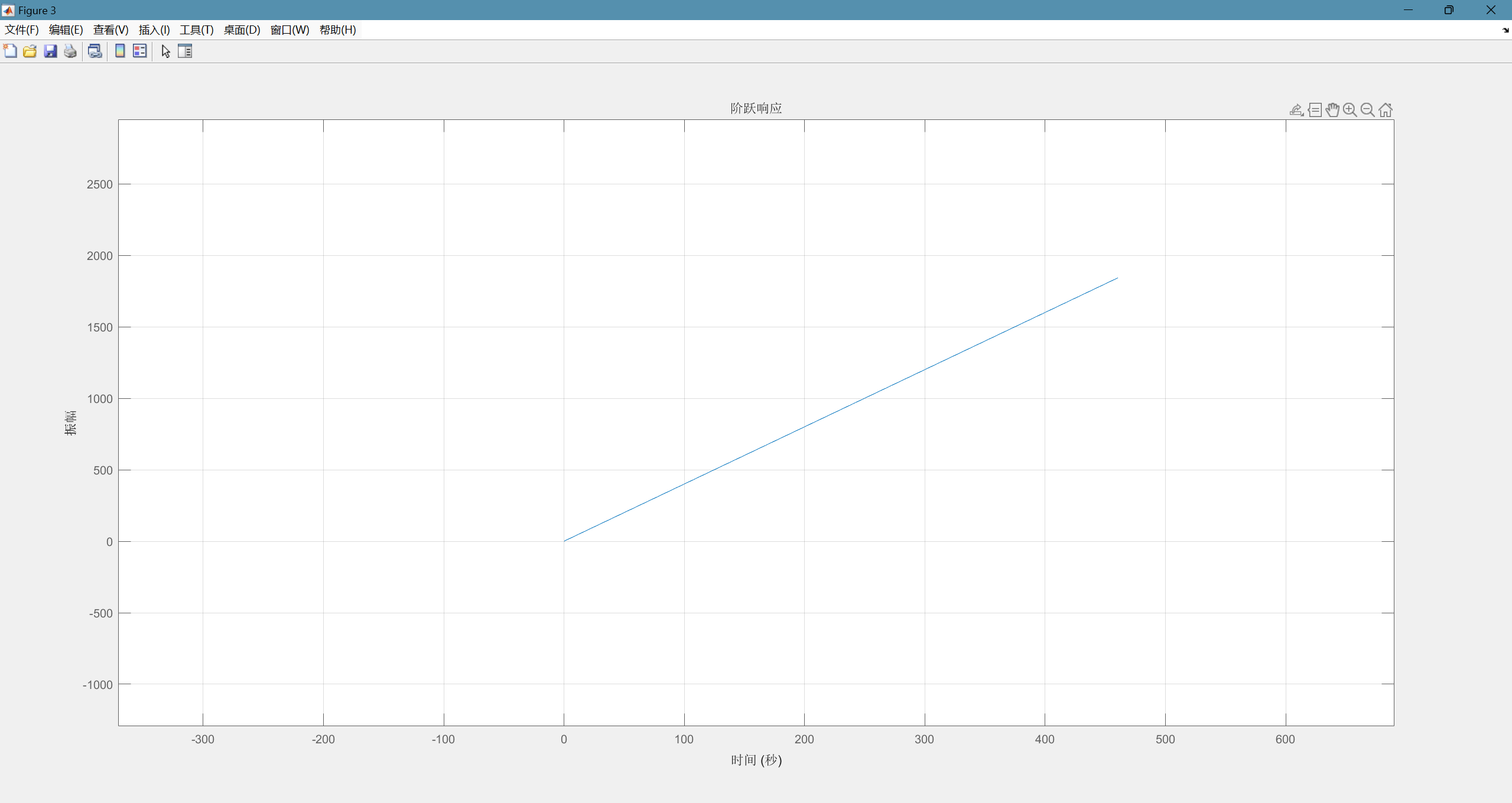
第五题
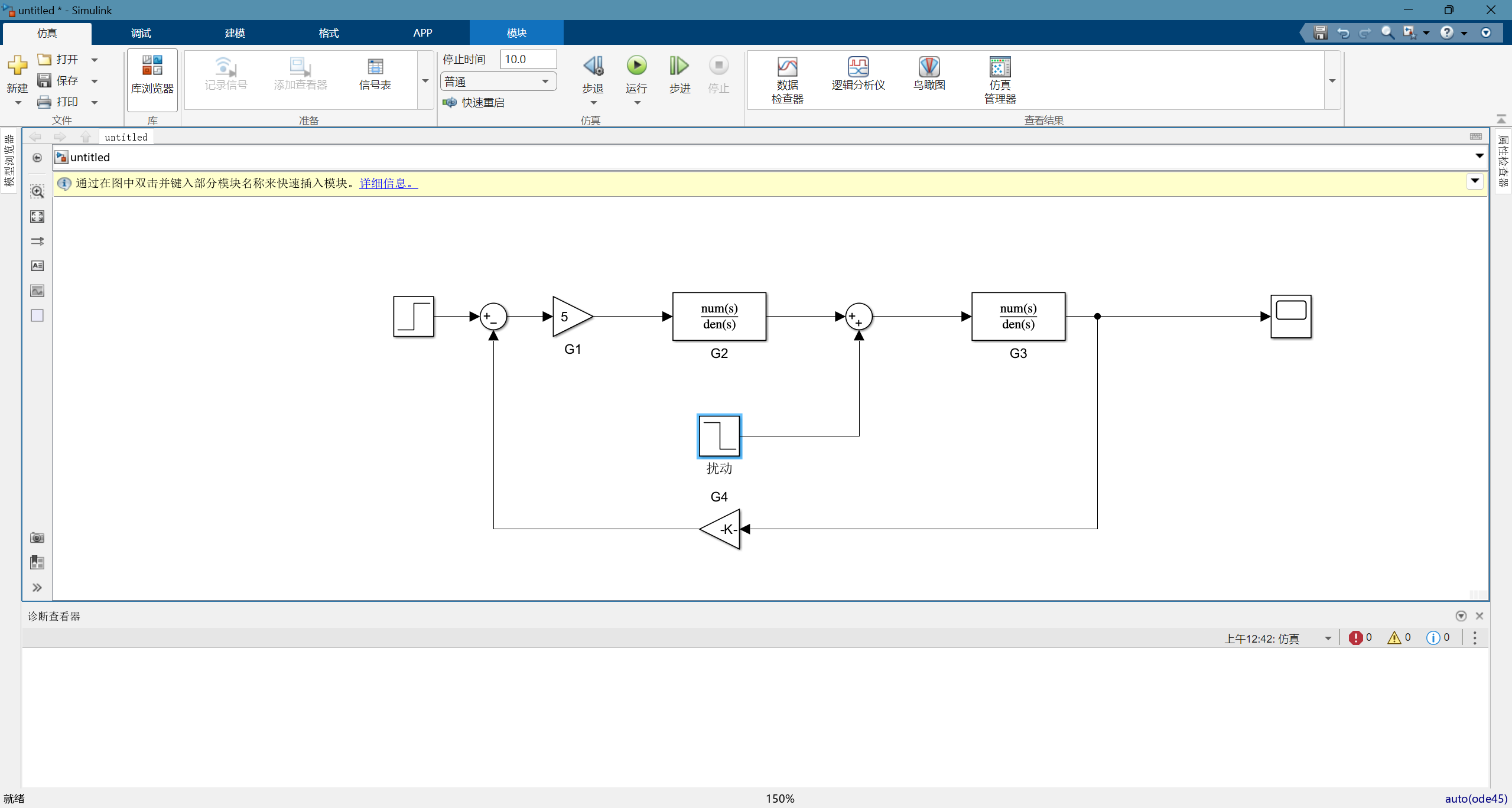
各component配置,如下图所示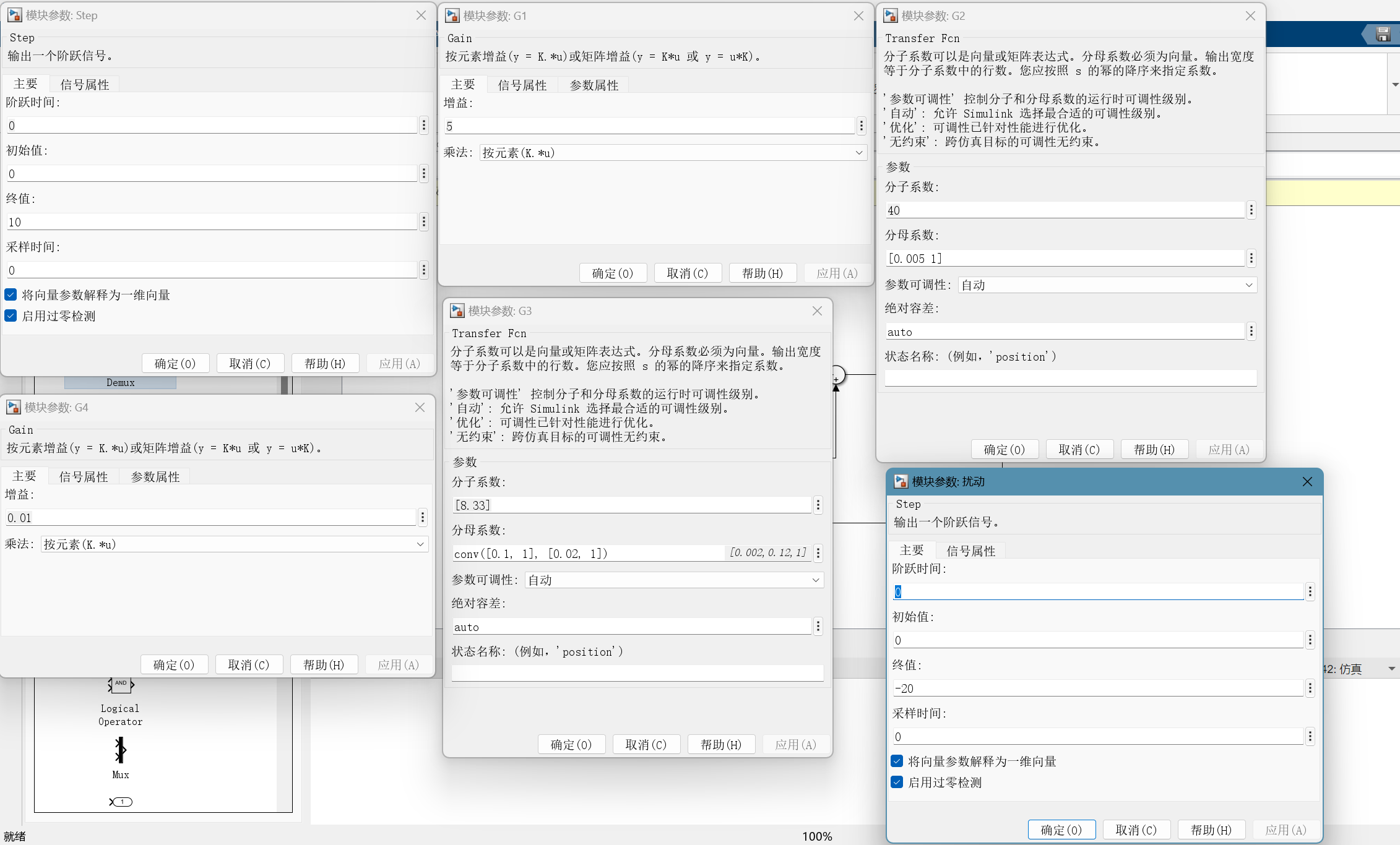
系统输出如下图所示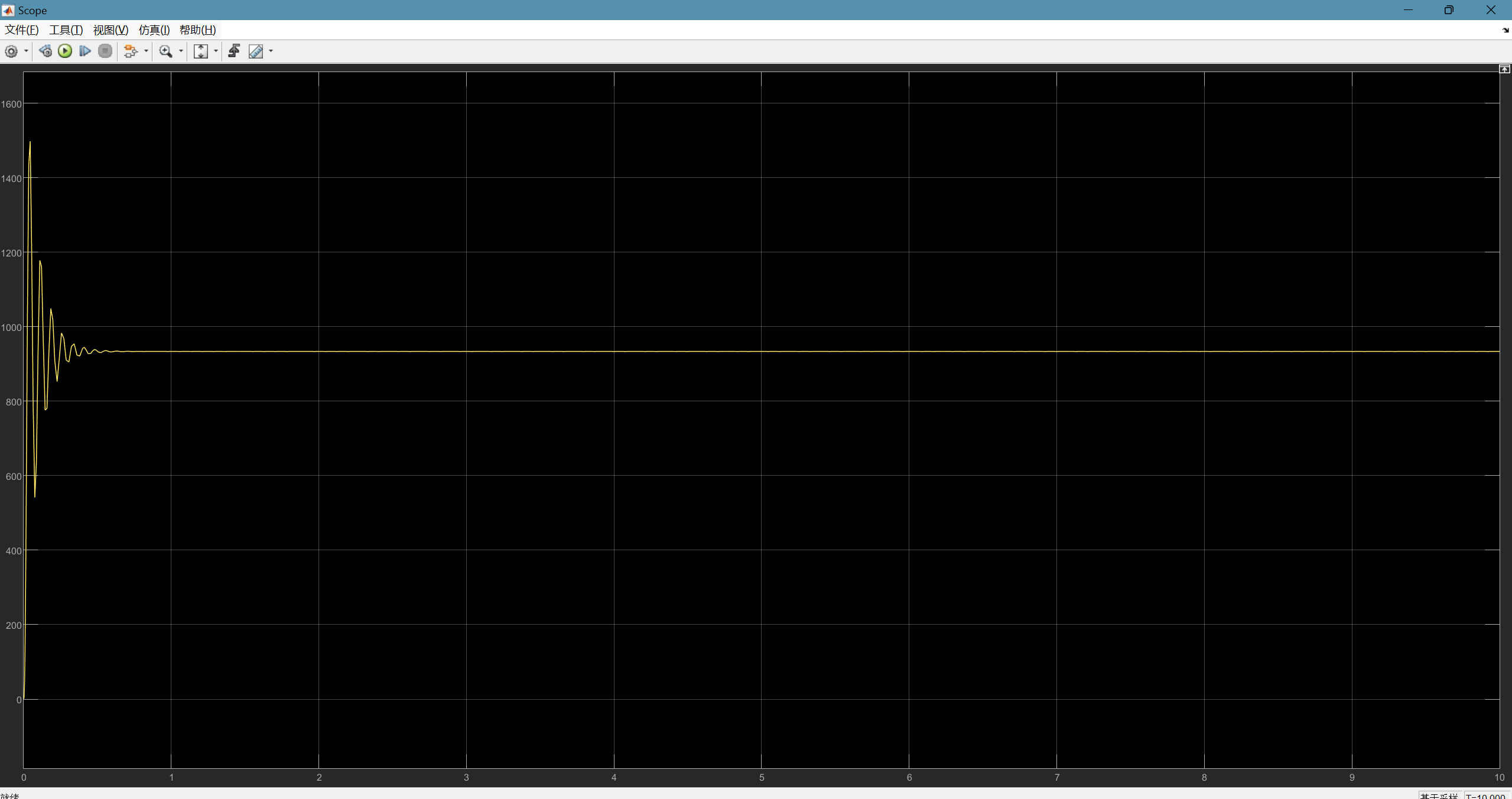
将系统输出连接至To WorkSpace模块上计算输出值
% 运行仿真后,在 MATLAB 中分析数据
simOut = sim('test'); % 替换为你的模型名称
outputData = simOut.get('outputData');
% 计算稳态值
steadyStateValue = mean(outputData(end-100:end)); % 取最后100个数据点的平均值
fprintf('稳态输出值: %.2f\n', steadyStateValue);
改善性能:
- 增加积分控制:
- 引入积分控制器(PI控制),可以消除稳态误差,提高系统的稳态精度。
- 引入前馈控制:
- 使用前馈控制来补偿已知的扰动输入,减少扰动对系统的影响。
- 调整反馈增益:
- 优化反馈增益 H(s)H(s) 以提高系统的响应速度和稳定性。
- 滤波器设计:
- 在输入端或反馈路径中加入滤波器,以减少高频噪声的影响

